Rozdíl mezi GPS a DGPS

Obsah
GPS a DGPS jsou satelitní navigační systémy. Základní rozdíl mezi GPS a DGPS spočívá v jejich přesnosti, DGPS je přesnější než GPS. DGPS byl záměrně navržen tak, aby snížil degradaci signálu.
GPS poskytuje přesnost přibližně 10 metrů, ale DGPS může poskytovat přesnost přibližně 1 metr, a to i nad 10 cm.
- Srovnávací tabulka
- Definice
- Klíčové rozdíly
- Závěr
Srovnávací tabulka
| Základ pro srovnání | GPS | DGPS |
|---|---|---|
| Počet použitých přijímačů | Pouze jeden, tj. Samostatný GPS přijímač | Dva, Rover a stacionární přijímače |
| Přesnost | 15-10 m | 10 cm |
| Rozsah nástrojů | Globální | Místní (do 100 km) |
| Náklady | Dostupné ve srovnání s DGPS | Drahý |
| Rozsah frekvencí | 1,1 - 1,5 GHz | Liší se podle agentury |
| Faktory ovlivňující přesnost | Selektivní dostupnost, satelitní načasování, atmosférické podmínky, ionosféra, troposféra a vícenásobná cesta. | Vzdálenost mezi vysílačem a roverem, ionosférou, troposférou a multipathem. |
| Použitý souřadnicový systém času | WGS84 | Lokální souřadnicový systém |
Definice GPS
Globální polohovací systém (GPS) poskytuje přesnou polohu objektu na Zemi. Využívá včasné signály generované satelity, které se točí kolem Země. GPS obsahuje soustavu 24 satelitů a navíc pro účely zálohování. K získání přesné polohy se používají čtyři satelity, tento proces se nazývá trilaterace.
GPS technologie používá samostatné přijímače, kde je poloha přímo vypočítána. Tato technika je náchylná k chybám, jako jsou neopravené chyby družicových hodin, orbitální parametrová chyba satelitu, ionosférické a troposférické zpoždění, vícecestné chyby, geometrické chyby a chyby výběru počátku. Pro snížení těchto chyb se vyvíjejí nové technologie. GPS může získat nominální přesnost 10-15 metrů.
Definice DGPS
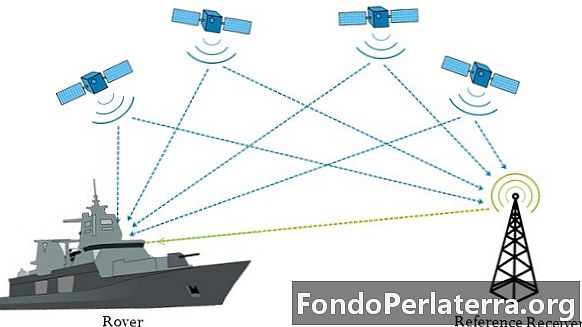
Systém diferenciálního globálního určování polohy (DGPS) je vylepšení GPS. Technologie DGPS může dosáhnout přesnosti až 10 cm. Snižuje nebo eliminuje degradaci signálu, což vede ke zlepšení přesnosti. Cílem diferenciálního GPS není jít přímo na místo; spíše najde polohu vzhledem k pevnému referenčnímu bodu. DGPS spoléhá na dva přijímače rover a referenční přijímač, rover je uživatel a referenční přijímač je také známý jako stacionární přijímač.
Stacionární přijímač je pevný a jeho poloha je známa systému. Satelitní informace jsou trvale vysílány směrem k roveru a základnové stanici. Věž základnové stanice používá svou známou polohu pro výpočet přesného načasování. Stacionární přijímač je informace pro roverový přijímač k opravě měření pomocí relativní polohy stacionárního přijímače.
- V GPS existuje samostatný přijímač, který přijímá signály ze satelitu, zatímco v DGPS jsou dva přijímače, referenční přijímač a rover (uživatel), kde rover přijímá kalibrovaný signál z referenčního přijímače (pevná základnová stanice).
- Přesnost systému GPS je kolem 15 metrů. Na druhou stranu je DGPS přesnější a může dosáhnout přesnosti až 10 cm.
- GPS přístroje pokrývají široký rozsah a lze je používat globálně, zatímco DGPS nástroje pokrývají krátký dosah až 100 km, ale tento rozsah se může měnit v závislosti na frekvenčním pásmu.
- GPS systém je oproti systému DGPS levnější.
- Frekvence signálu vysílaného satelity v GPS se pohybuje mezi 1,1 a 1,5 GHz. Naopak v DGPS satelity nevysílají pevný rozsah frekvence, vysílaná frekvence závisí na agenturách.
- Faktory, které ovlivňují přesnost systému GPS, jsou selektivní dostupnost, satelitní načasování, atmosférické podmínky, ionosféra, troposféra a multipath. Naproti tomu je systém DGPS ovlivňován vzdáleností mezi vysílačem a roverem, ionosférou, troposférou a multipathem, ale v menší míře.
- GPS používá systém časových souřadnic WGS84, což je zemský pozemní systém, zemský a geodetický údaj. Na rozdíl od DGPS používá lokální souřadnicový systém.
Závěr
Systém diferenciálního globálního určování polohy (DGPS) je přesnější technologie než jeho předchozí systém globálního určování polohy (GPS). Přesnost v DGPS je zlepšena použitím dvou přijímačů namísto použití jednoho, který najde přesné umístění pomocí relativních pozic.





